In robotics, physics engines and simulators serve different but complementary roles. A physics engine handles the mathematics of simulation such as computing forces, collisions, and the dynamics that make objects move and interact realistically. A simulator builds on these engines to provide a complete virtual testing environment, by adding sensors, 3D environments, visualization tools, and interfaces for communication with frameworks like ROS 2. In short, the physics engine provides the underlying math and realism, while the simulator delivers the interactive and visual layer needed for full robotics development and testing.
ROS 2 (Robot Operating System 2) is an open-source middleware framework that enables communication between robot components such as sensors, controllers, AI modules, and simulators. Despite its name, ROS 2 is not a full operating system, but a flexible software layer that orchestrates interactions, allowing data exchange through topics, services, and actions. It adds features essential for real-world and industrial applications, including enhanced security, real-time support, multi-robot coordination, and cross-platform compatibility. Its wide adoption in research, education, and industry has made it the primary middleware layer connecting simulators and physics engines, enabling developers to test, visualize, and control robots efficiently in both virtual and real-world environments.
In most robotics systems, ROS 2 interacts with a simulator, which manages the virtual environment, sensors, and visualization, while the simulator relies on a physics engine underneath to calculate realistic motion and forces. Some physics engines, such as MuJoCo or PyBullet, can connect directly to ROS 2 through specialized bridges, but for most practical robotics setups, the simulator serves as the intermediary layer bridging ROS 2 with the physics engine.
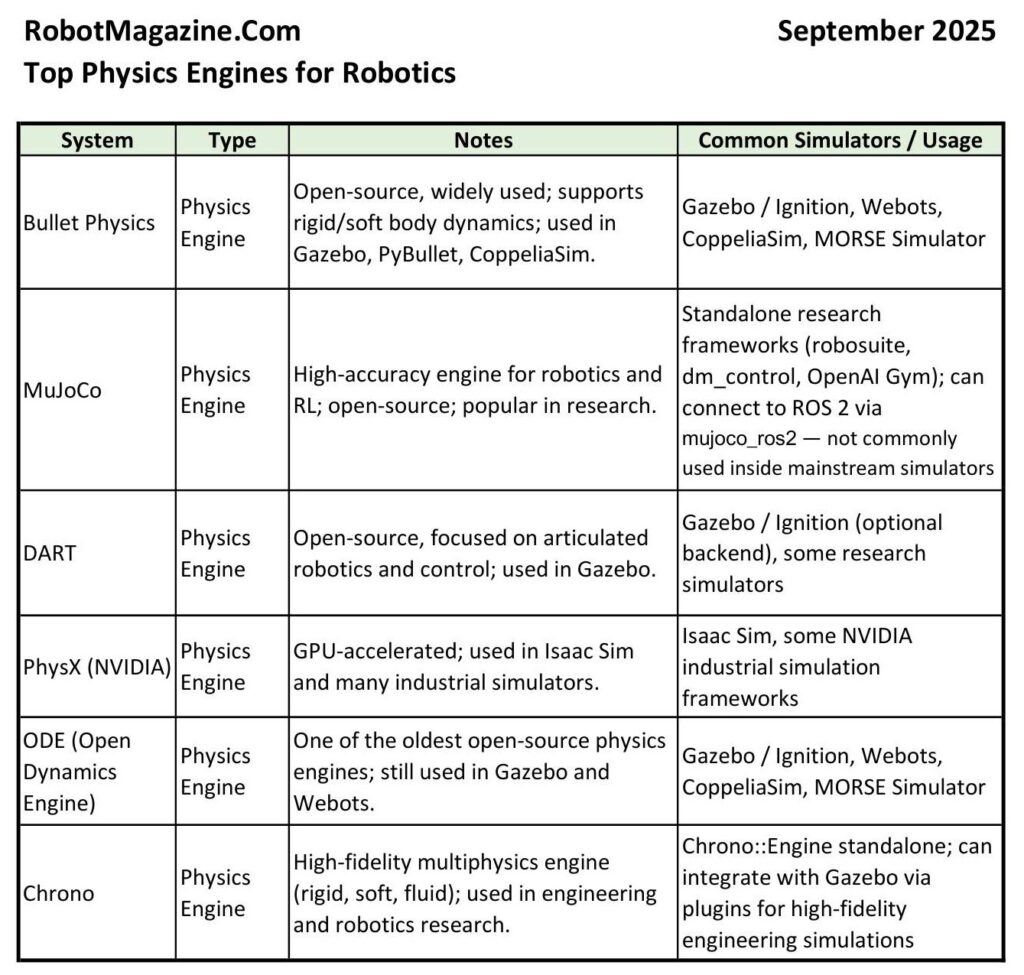
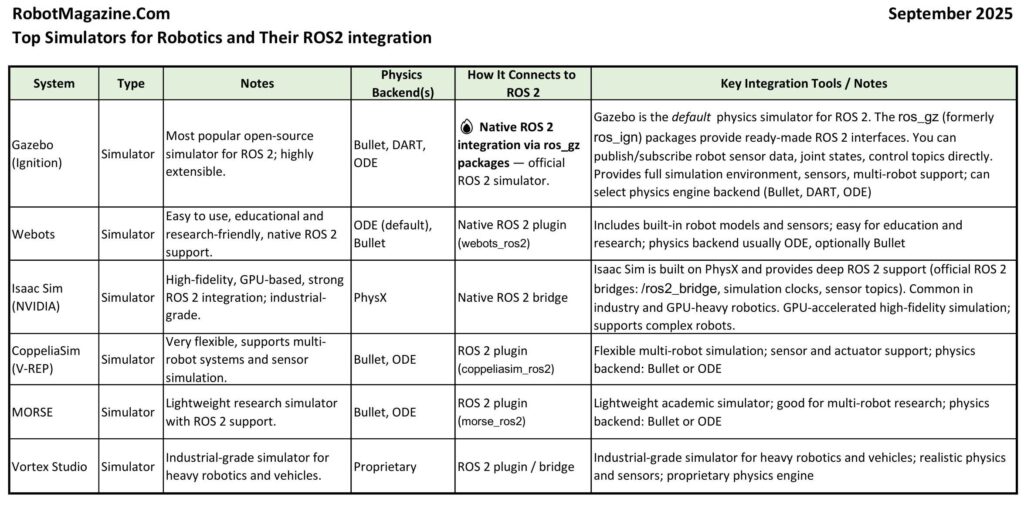
Below you can find a list of most widely used physics engines and simulators in robotics, and how they integrate with each other and ROS 2.
All trademarks and brands seen in this list belong to their respective owners and they are displayed here for informational purposes only, with no intent to infringe or imply endorsement by or from this website.
Post By: A. Tuter
————————————-
Terms of Use:
Copying or republishing our content without written permission is prohibited. We maintain dated records. Content may be inaccurate or incomplete, and use is at your own risk. See our Terms page.