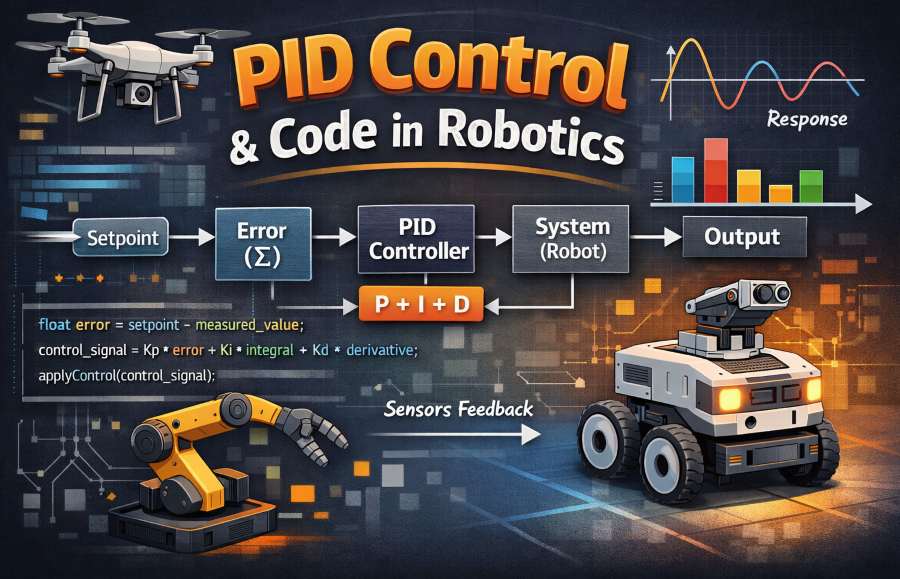
PID stands for Proportional, Integral, and Derivative, representing one of the most fundamental feedback control algorithms widely used in industrial automation, robotics, and automotive systems. The controller continuously calculates an error value as the difference between a desired setpoint and a measured process variable. To minimize this error over time, the algorithm applies three distinct corrective terms: the Proportional (P) term provides a correction relative to the current error; the Integral (I) term addresses the accumulation of past errors to eliminate steady-state offset; and the Derivative (D) term predicts the future trend of the error by analyzing its rate of change, helping to dampen the system and prevent overshoot.
In its classical mathematical form, the PID controller output can be expressed as:
$$
u(t) = K_p e(t) + K_i \int e(t)dt + K_d \frac{de(t)}{dt}
$$
By balancing these three responses, a PID controller enables dynamic systems—such as a robotic arm or a heating element—to reach and maintain their target state with high precision and stability.
In the field of robotics, PID control is the standard approach for regulating motor speed, joint positions, and the orientation of self-balancing platforms. Engineers often utilize cascaded or nested control loops, where a faster inner loop manages motor velocity while an outer loop governs the final position. While hobbyists frequently rely on manual heuristic tuning, professional engineering practice involves systematic methods such as Ziegler–Nichols tuning or software-based auto-tuning algorithms to determine optimal gain values. Despite its versatility, PID control has technical limitations; specifically, the derivative component is highly sensitive to sensor noise, which can produce erratic outputs if not properly managed through low-pass filtering or other signal-processing techniques.
For multirotor drones, PID controllers are essential for stabilizing the aircraft against external disturbances such as wind or shifts in the center of gravity. The flight controller processes data from the inertial measurement unit (IMU)—primarily gyroscopes and accelerometers—and compares the drone’s actual attitude with the pilot’s commands along the roll, pitch, and yaw axes. A well-tuned P-term ensures rapid response to control inputs, while the I-term compensates for persistent forces that could otherwise cause the drone to drift over time. The D-term plays an important role in smoothing aggressive maneuvers by providing damping that stops rotation precisely when intended.
Modern drone flight controllers implement PID control in ways that extend beyond the basic textbook model. Most systems use multiple nested control loops, where one loop controls angular rates while another regulates the drone’s orientation. Sensor data from gyroscopes and accelerometers is combined through sensor fusion algorithms to estimate the drone’s motion accurately. Additional filtering is applied to reduce vibration and measurement noise, particularly for the derivative component which is sensitive to rapid signal changes. As a result, modern flight controllers achieve the highly stable and responsive flight characteristics expected from today’s multirotor drones while still relying on the fundamental principles of PID feedback control.
Post By: A. Tuter
Terms of Use: Unauthorized copying is prohibited; we maintain dated records to document original publication. Content is provided “as is” and may contain inaccuracies; use it at your own risk. See our Terms Page.