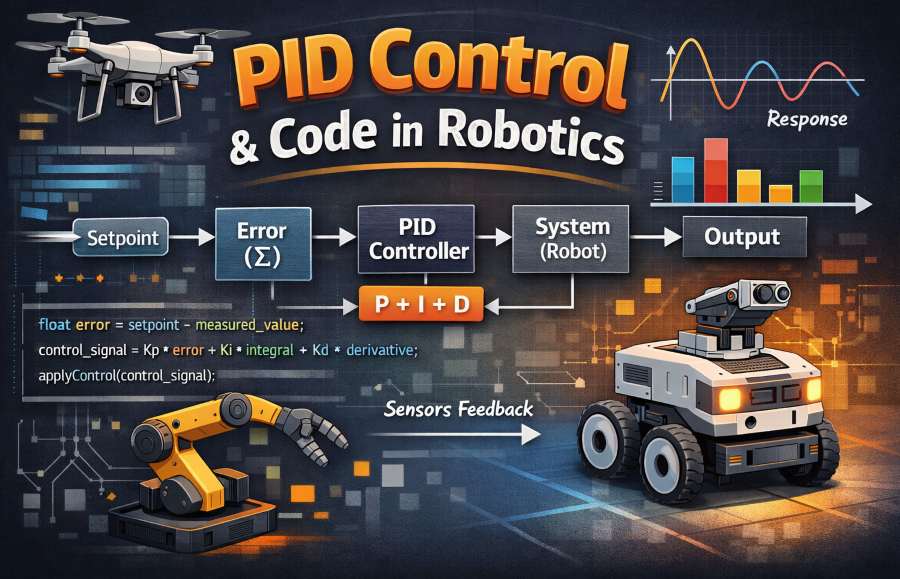
PID Control Explained for Robotics: How Robots and Drones Stay Stable
March 14, 2026
PID stands for Proportional, Integral, and Derivative, representing one of the most fundamental feedback control algorithms widely used in industrial automation, robotics, and automotive systems.…