
RoboDK CAM: Simplifying Robot Machining Workflows
March 28, 2026
RoboDK has introduced RoboDK CAM, a standalone CAM solution aimed at simplifying robotic machining workflows. The software targets a key challenge in automation: the complexity…
RoboDK has introduced RoboDK CAM, a standalone CAM solution aimed at simplifying robotic machining workflows. The software targets a key challenge in automation: the complexity…
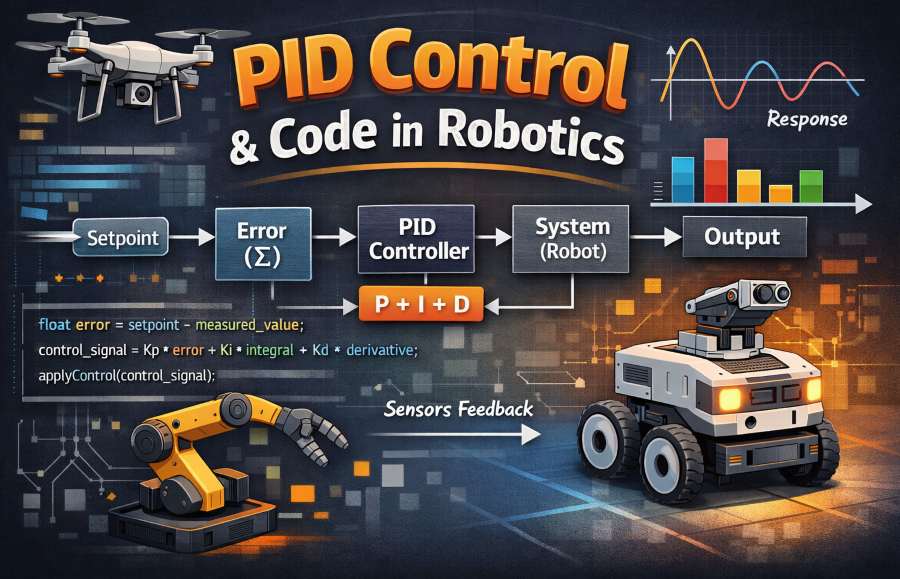
PID stands for Proportional, Integral, and Derivative, representing one of the most fundamental feedback control algorithms widely used in industrial automation, robotics, and automotive systems.…
Ever crashed a pricey robot prototype into a wall during testing? Or waited days for one trial-and-error run to wrap up? If you’re into robots—whether…
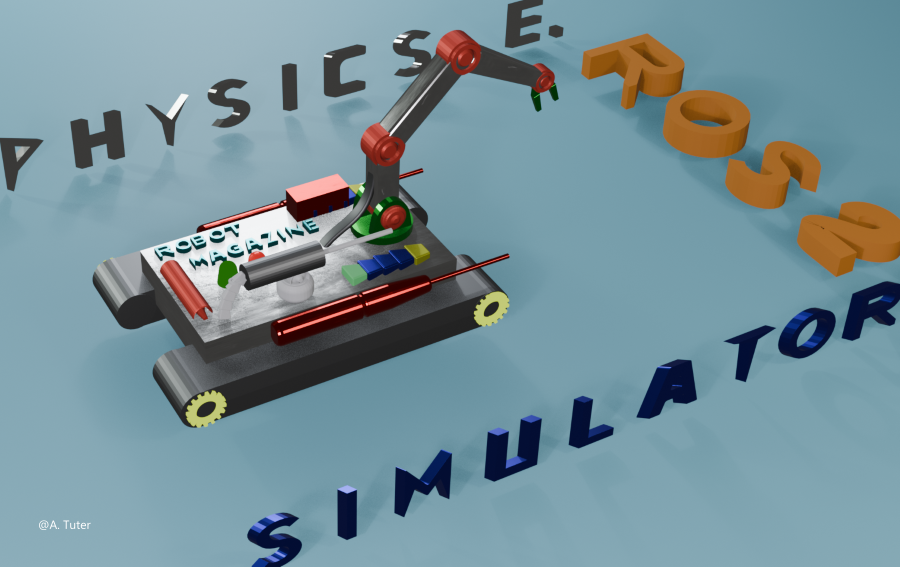
In robotics, physics engines and simulators serve different but complementary roles. A physics engine handles the mathematics of simulation such as computing forces, collisions, and…

NVIDIA and OpenAI have just entered into a partnership, to build 10 GW of AI data centers with NVIDIA GPUs. As each GW is deployed,…
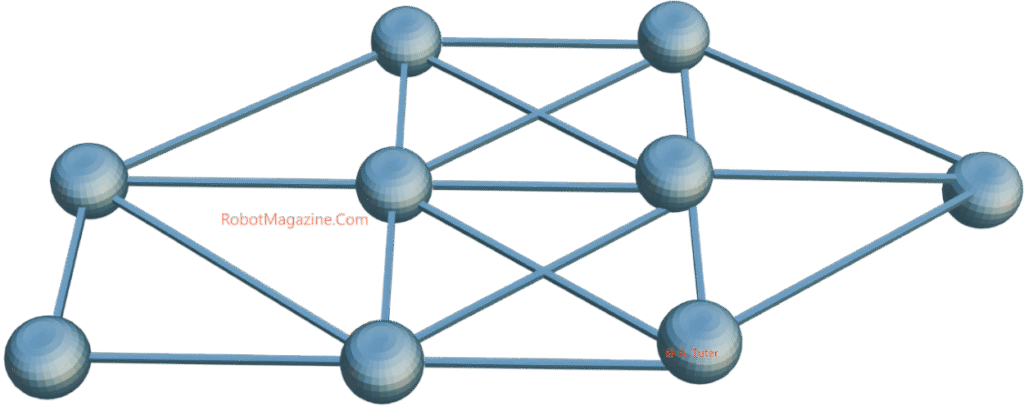
A neural network is made of layers, and layers are made of nodes (also called neurons or units). It is these nodes that process input…

When designing robots, there is the need for a system in standardized format, to describe physical and kinematic properties of a robot. This is achieved…