How Autonomous Robots Navigate Dynamic Spaces in Real Time
Robotic systems operating in commercial environments are increasingly required to move through spaces that are not fixed or predictable. Retail stores, warehouses, airports, and similar settings are constantly changing as people move, objects shift, and layouts evolve. In these conditions, robot navigation becomes one of the most critical capabilities of an autonomous system. Rather than simply following instructions, a robot must interpret its surroundings and adjust its movement in real time. This approach is often described as adaptive robot navigation.
From Fixed Routes to Flexible Navigation
Many earlier robotic systems relied on predefined routes. These paths were typically configured in advance and repeated during operation. While effective in stable environments, this method introduces limitations when conditions change. A temporary obstacle, a blocked passage, or even minor layout adjustments can disrupt operation and reduce efficiency.
Adaptive robot navigation replaces this rigid structure with a more flexible approach. Instead of committing to a fixed route, the robot continuously evaluates its surroundings and adjusts how it moves. This allows it to respond to changes as they occur, rather than depending on prior setup.
Real-Time Path Planning in Practice
At the core of adaptive navigation is the ability to plan and update movement paths continuously. Using a combination of sensors and onboard processing, often supported by mapping and localization techniques such as SLAM, robots build a live understanding of their environment. Based on this, they generate paths that balance efficiency, coverage, and safety.
These paths are not static. As new information becomes available, such as moving obstacles or newly accessible areas, the robot updates its route. This ongoing adjustment enables smoother operation and reduces the likelihood of interruptions, which is essential for reliable autonomous robot navigation.
Environmental Awareness and Obstacle Handling
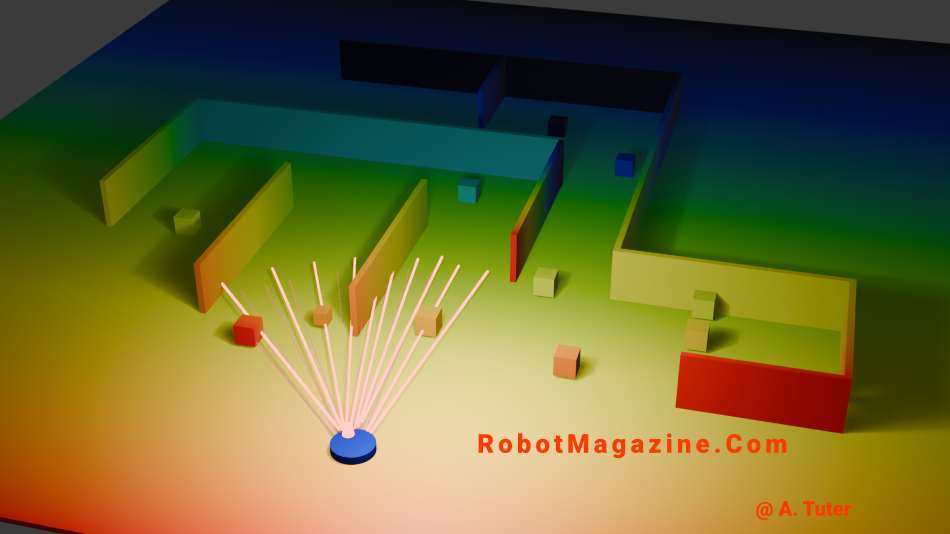
Navigation in dynamic environments depends heavily on environmental awareness. Robots must distinguish between free space and obstacles, recognize changes, and react appropriately in real time. This is typically achieved through sensor fusion, where data from multiple sources such as RGB cameras, depth cameras, LiDAR, and inertial measurement units (IMUs) are combined into a unified representation of the environment. At the same time, the robot maintains a continuous estimate of its position and orientation using localization techniques often associated with SLAM.
From this sensor data, robots generate internal maps such as occupancy grids or point clouds, which represent navigable and non-navigable areas. These maps are updated continuously as new observations are made, allowing the system to reflect changes like moving people, temporary obstacles, or shifting layouts. On top of this, perception algorithms—sometimes supported by machine learning—can classify objects, predict motion (e.g., human movement), and improve decision-making in crowded or uncertain environments.
With this level of awareness, navigation becomes a continuous optimization problem. Local path planning algorithms, such as dynamic window approaches or sampling-based planners, enable the robot to adjust its trajectory in real time while avoiding collisions and maintaining efficiency. Instead of stopping when encountering an obstacle, the robot can smoothly reroute, slow down, or re-prioritize its path based on current conditions.
This combination of perception, mapping, and real-time planning allows modern robots to operate robustly in environments that are not fully predictable, making obstacle handling a seamless part of autonomous navigation rather than a point of failure.
Human Interaction and System Oversight
Even as navigation becomes more autonomous, human interaction remains part of the overall system. Operators typically interact with robots through digital interfaces that provide an overview of operations. These interfaces can be used to define areas of operation, monitor robot activity, and review performance data.
Rather than controlling each movement directly, these tools allow users to guide and supervise robotic systems at a higher level. This makes it possible to manage multiple robots efficiently while relying on autonomous navigation for day-to-day operation.
Real-World Example of Adaptive Robot Navigation
Below is a real-world example of adaptive robot navigation in a commercial setting, including both system interfaces and robots operating within active environments. Images courtesy of Brain Corp.
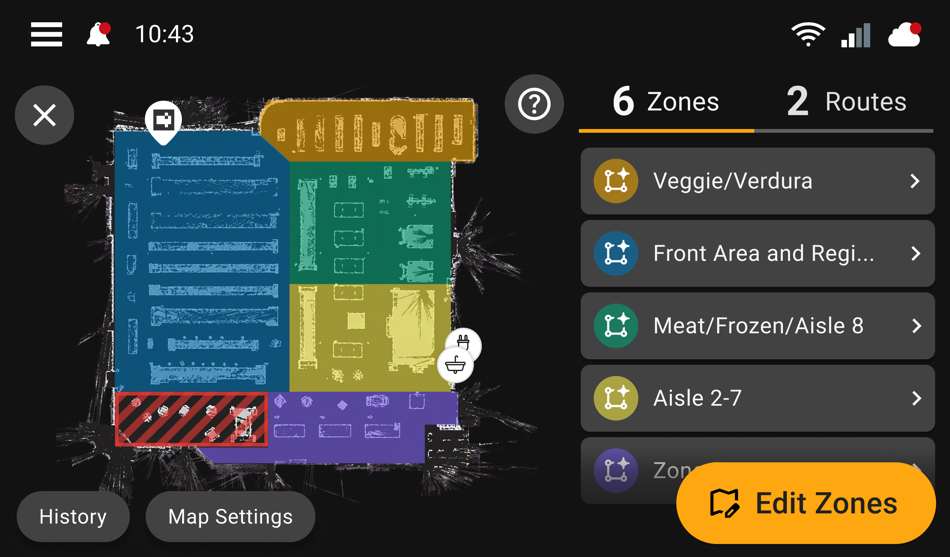
Image Credit: Brain Corp. www.braincorp.com
Image Credit: Brain Corp. www.braincorp.com
In practical applications, robots equipped with adaptive navigation move through environments where conditions are constantly changing. They adjust their paths as obstacles appear, navigate around people or objects, and continue operating without relying on predefined routes. At the same time, operators can monitor and manage these systems through dedicated interfaces, supporting efficient daily use.
Practical Impact and Outlook
Adaptive robot navigation improves efficiency by reducing overlap and minimizing the need for manual setup. By adjusting to changes in real time, robots can maintain consistent operation even in dynamic environments.
These capabilities are expanding across logistics, delivery, and service robotics, where navigating complex spaces is essential. As the technology advances, robots are becoming better suited to operate in environments designed for humans.
Overall, this shift toward responsive, real-time navigation is making autonomous robots more practical for commercial use.
Post By: A. Tuter
Terms of Use: Unauthorized copying is prohibited; we maintain dated records to document original publication. Content may contain inaccuracies. All trademarks mentioned belong to their respective owners, and we are not affiliated with them, and no endorsement is implied. Certain images and/or text in this post are used with permission from the right holders. See our Terms Page.